The current stage my project is at now is slowly transitioning from research and design to CAD work and creating small simple prototypes to test their design, stability and to test wheter my designs actually work or make sense.
So far, I’ve created prototypes of my microscope, glasses and hand
To see if my design work or make sense, I would first start by sketching the pieces of my designs on paper, then I would cut them out and trace each piece onto foam core poster board, once all the pieces were cut out, I then drilled holes onto the ends of each finger joint and through the hand, to secure the fingers and joints in place I used toothpicks and glued the ends to keep them in place.
Foam Core poster board prototypes

The Typewriter prototype
3D Prototypes
The Hand
Before I moved on to using Fusion 360 to develop my skills and learn more intricate techniques, I started by using tinkercad to create the basic shapes, I started by creating my prosthetic hand.
I first started by creating and printing a finger, the result was decent, although I did have to alter it by cutting chunks off each section and sanding the sides of each joint, this was so the finger was able to move around properly and curl into a fist. Once all the pieces were modified, I cut up some toothpicks and slid them through the holes on each joint and glued them in place. (This was useful, for the next time I design the hand, that I would make sure that there’s plenty of distance between each finger joint, allowing the fingers to move flowingly)
Once I was satisfied with the finger movement, I then designed and printed out the main hand so I could attach all the fingers to.
Once the main hand was printed out and all the fingers were cut and trimmed down i then inserted the fingers into the knuckle slots and kept them in place using toothpicks and gluing the ends in place with superglue.
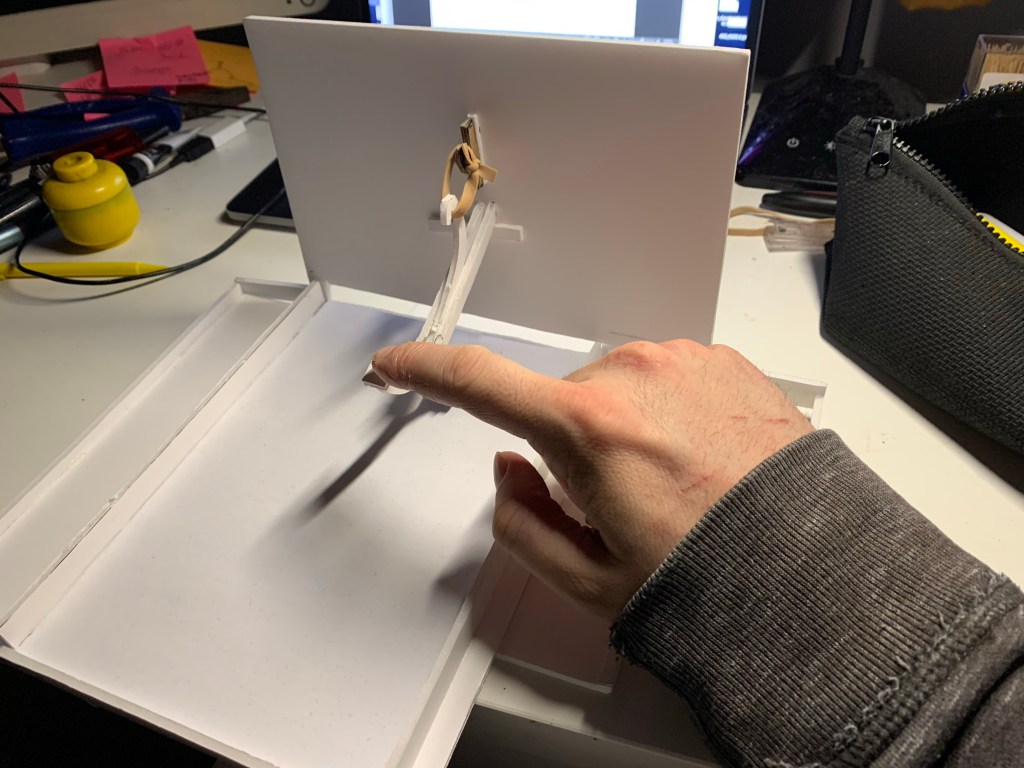
Once all the fingers were attached, I took my dremel and drilled holes to each joint of the fingers and glued in these loop pieces I 3D printed then I took some string and tied knots at the ends to secure in place, this would then allow me control to move the fingers in the direction way I wanted.

The Fully assembled Prototype- I was happy with how the build turned out in quality, build and function, especially how the fingers moved, for future models, I might consider using fishing wire as opposed to string, this would help hide the strings and add a little subtlety.

Here is a link to a video of my prosthetic hand in action:
